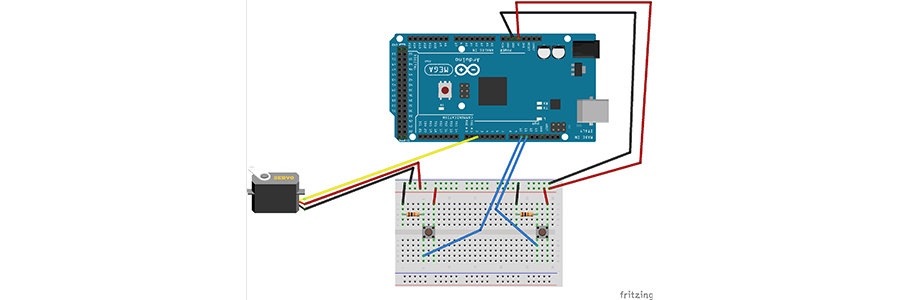
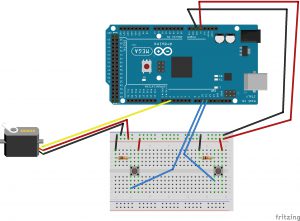
I had a request to take a servo and attach it to the Arduino. Watch the video, I know the text is hard to read in the video. Please see full code below. I added some extra things to make sure the servo can’t be pushed to go beyond the limit because the servo I am using can only go 180. Some servos can go 360 degrees. I also added some code check if someone is pushing both buttons at once.
| Parts Needed |
#include <Servo.h>
Servo myservo; // create servo object to control a servo
const int LeftbuttonPin = 10; //Left button
const int RightbuttonPin = 11; //Right button
int pos = 90; //used to keep track of the position of the servo
int LeftState = 0; //left is not pressed
int RightState = 0; //right is not pressed
void setup() {
myservo.attach(2); // attaches the servo on pin 2 to the servo object
pinMode(LeftbuttonPin, INPUT); //make the pin an input
pinMode(RightbuttonPin, INPUT); //make the pin an input
myservo.write(90); //move to 90 first or middle
Serial.begin(9600);//setup serial for diagnostics
}
void loop() {
LeftState = digitalRead(LeftbuttonPin); //grab button value high or low
RightState = digitalRead(RightbuttonPin); //grab button value high or low
if (LeftState == HIGH && RightState == HIGH) {
// do nothing can't go in both directions
Serial.println("both pushed");
} else {
if(LeftState == HIGH) //check if left pushed
{
Serial.println("left high");
if(pos < 180)
{
Serial.println("left not at end");
pos += 1; //increase position by 1
Serial.println(pos);
myservo.write(pos);
}
}
if(RightState == HIGH) //check if right pushed
{
Serial.println("right high");
if(pos > 0)
{
Serial.println("right not at end");
pos -= 1; // decrease position by 1
Serial.println(pos);
myservo.write(pos);
}
}
}
// tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}